Please note this guide is updated regularly – Last Updated 8th April 2016
If you follow this guide and want to add or contribute to pictures/guide, please contact us.
- Remove Props and pull apart Quad
- Download OpenPilot GCS 15.02.02, You may also need the STM32 Virtual Com Port driver.
- Install the Cleanflight Configurator from the Chrome Web Store.
- Download Cleanflight 1.10 firmware .bin or Latest Betaflight CC3D BIN File from here
NOTE: You need .bin file – so thats why we have put Cleanflight 1.10 ONLY, versions after this do not have .bin file.
For difference on Cleanflight vs Betaflight view this article. - On openpilot and open the firmware tab. Click rescue then plug in your Quad to computer via USB (no power)
- Click open and select .bin that you downloaded.
- Click the checkbox, I know what I’m doing!
- Click Flash
- WAIT TILL 100%
- IMPORTANT! Leave USB plugged in and power the board via esc input
- Click boot (in same firmware window), motors will beep and wait till blue light on the cc3d is steadily blinking
- Close openpilot
- Unplug everything
- Open cleanflight
- Power your Quad and plug usb back in now.
- Click connect. (if it fails, try changing the port)
- Congrats! You now are on Cleanflight. To connect your Quad to Cleanflight you always need to use power now, plug in your battery!
- Place Quad on flat surface and under setup, click calibrate accelerometer.
- Change minimum throttle to 50 above what your receiver shows on Receiver tab. (usually 1000, so put 1050)
- Click Save and reboot
- Now goto your PID tuning.
- Change PID Controller to LUXFloat
- Click SAVE
- Now change the following
Change roll rate to 0.70
Change pitch rate to 0.70
Change YAW rate to 0.40
TPA should be 0.00
TPA breakpoint should be 1500 - Now goto receiver tab, and check all your transmitter channels are correct, they usually are different and you will need to reconfigure.
- I have the FlySky FS-R6A receiver, so for me, I had to move the following.
Ch 1 moved to Ch3
Ch 3moved to Ch 5
Ch 4 moved to Ch 1
Ch 5 moved to Ch 4
(You may need to swap Ch 2 and Ch 4 around if your pitch and roll is incorrect.
- Now on the right (still receiver tab) change throttle to 0.50, throttle EXPO to 0.00, RC rate to 1.00, RC expo 0.00 – Save
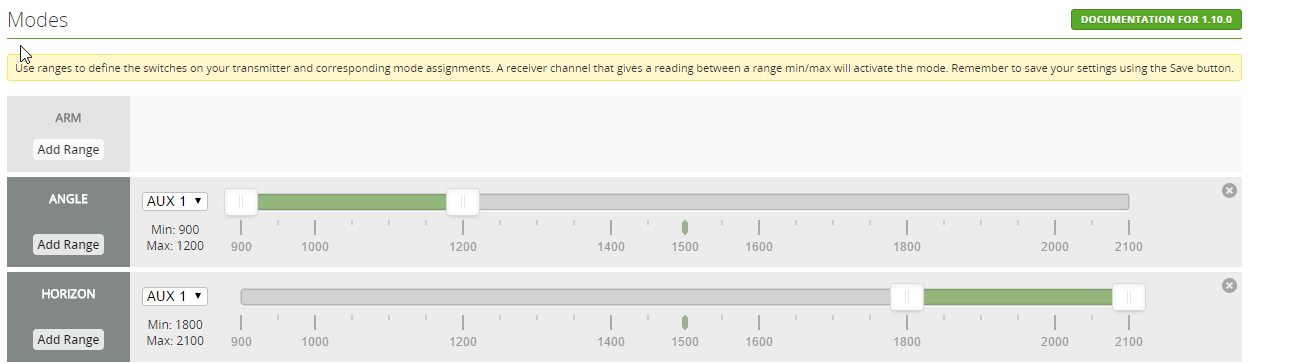
- Now you want to set up your AUX Switches, open the Modes Tab.No mode selected = ACRO+ / Rate mode by default.Altitude mode = Angle Mode
Rattitude mode = Horizon Mode
If you your switch only has two positions it would look something like this.

0 = Horizon Mode
1 = Acro/RateIf you have a switch that has 3 positions it may look like this.

0 = Angle
1 = Acro/rate
2=Horizon - If you have more than six channels you may want to setup ARM as a switch, as well as a buzzer, or lights.
- Now save your settings. By moving your switches you should be able to test the setup. Green = mode activated, grey means Acro/Rate mode.
- Now we need to calibrate ESC, go to the motor tab. remember, you should have removed props at the start, if you didnt, DO THIS NOW.
- Unplug battery
- Slide Master to MAX
- Plug in battery, wait for beeps.
- Slide Master to MIN
- ESC Calibration is now complete, however you must test that it has worked corectly.
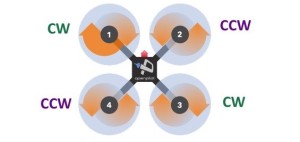
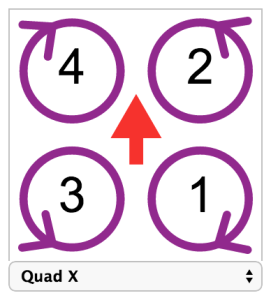
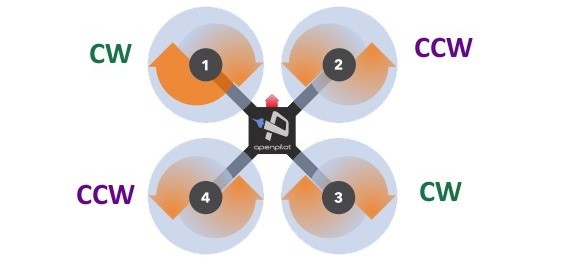
Arm copter, and all motors should spin at 0 throttle. If only some do, you need to redo the above steps until they are all spinning correctly. - You now need to swap motor configuration as cleanflight configuration is different as per below.
LEFT is openpilot RIGHT is Cleanflight
- Copy and paste the below into the CLI tab.
mixer custom
mmix reset
mmix 0 1.0, 1.0, -0.93, -1.0
mmix 1 1.0, -1.0, -0.93, 1.0
mmix 2 1.0, -1.0, 0.93, -1.0
mmix 3 1.0, 1.0, 0.93, 1.0
save - Your cc3d will reboot. Give it a test flight! Make sure you are open space in case you missed a step and it crashes.
Good job!
I used this to help me configure the motor mapping for a Speedix 250 with a cc3d. worked very well. I understand the concept much better now. On mine, after saving it took 10 seconds before writing to the controller. I would have to wait and watch the LED flash and stop before unplugging the USB cable or it wouldn’t have time to save. then would have to disconnect the battery and plug the USB back in to connect to Betaflight. Someone needs to do a video on this, couldn’t find any on thing but yours article about this. If you’re new to this and the motors are mapped wrong it would be a pain to figure out.
Thanks