1x Bolt210 Black Ops Frame with 4 Inch arms
1x CC3D Flight Controller running Betaflight 2.6.1
1x Matek PDB BEC-5V/3A LED Lighting Control Tracker Low Voltage Alarm LED & POWER HUB 5in1
4x Xnova 2206-2500kv Multi-Rotor Racing Pack (Set of 4)
4x FVT Littlebee 30a ESC BHHELI
1x Aomway T25 5.8GHz Selectable 25/200mW 40CH FPV Tx
1x AOMWAY CBA004 Antenna Extension Adapter Cable RP-SMA-MALE to SMA-Female Plug/SMA JACK 80mm
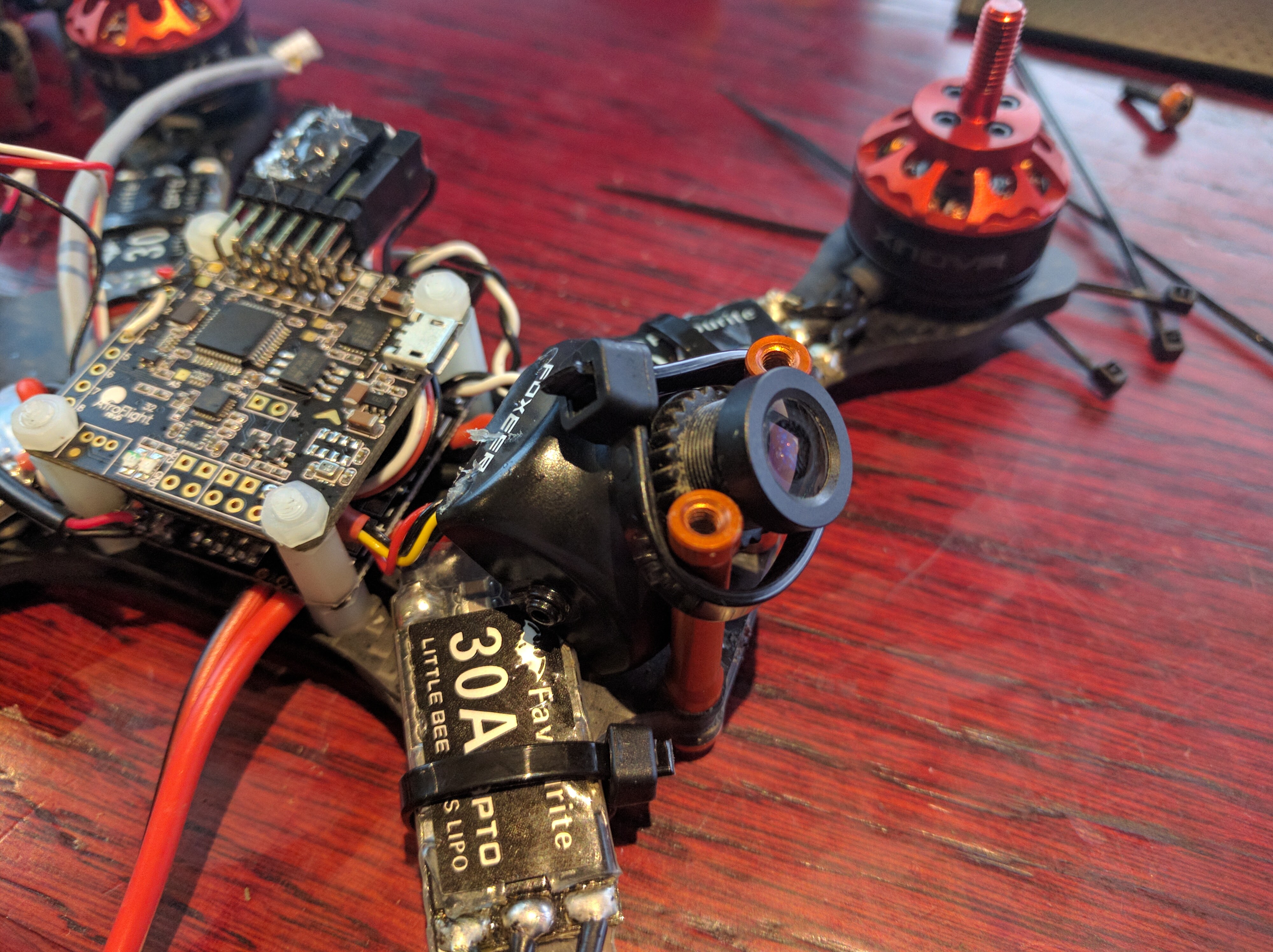
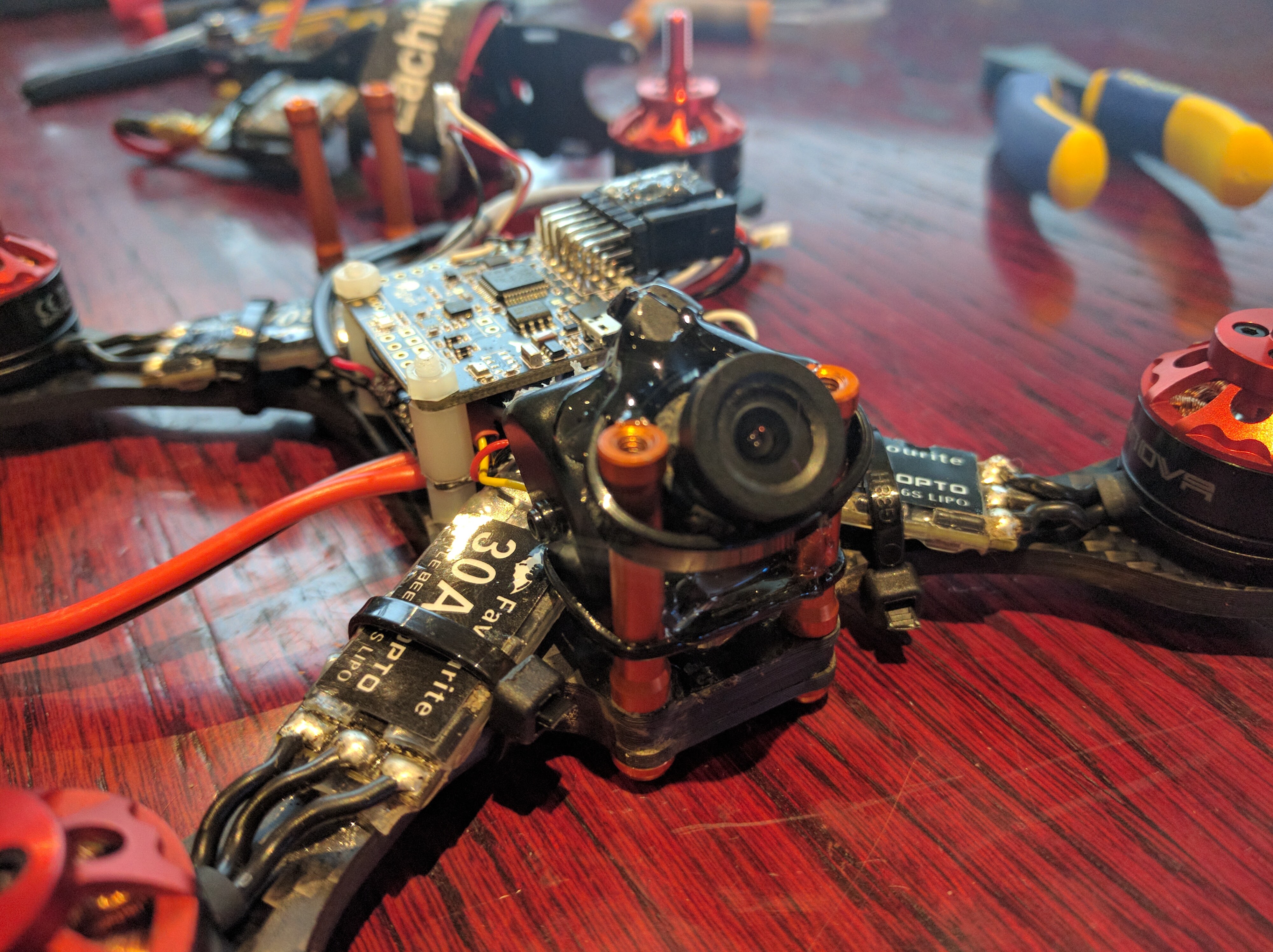
1x Foxeer HS1177 XAT600M DC5V-22V 600tvl Sony Super HAD CCD FPV Camera IR Block 2.8mm Lens PAL
1x FrSKY Taranis X9D Plus Mode 2 2.4Ghz Digital Telemetry Radio System With Alluminium Case
1x FrSky XSR 2.4GHz 16CH ACCST Receiver with S-Bus and CPPM
Some notes about the build.
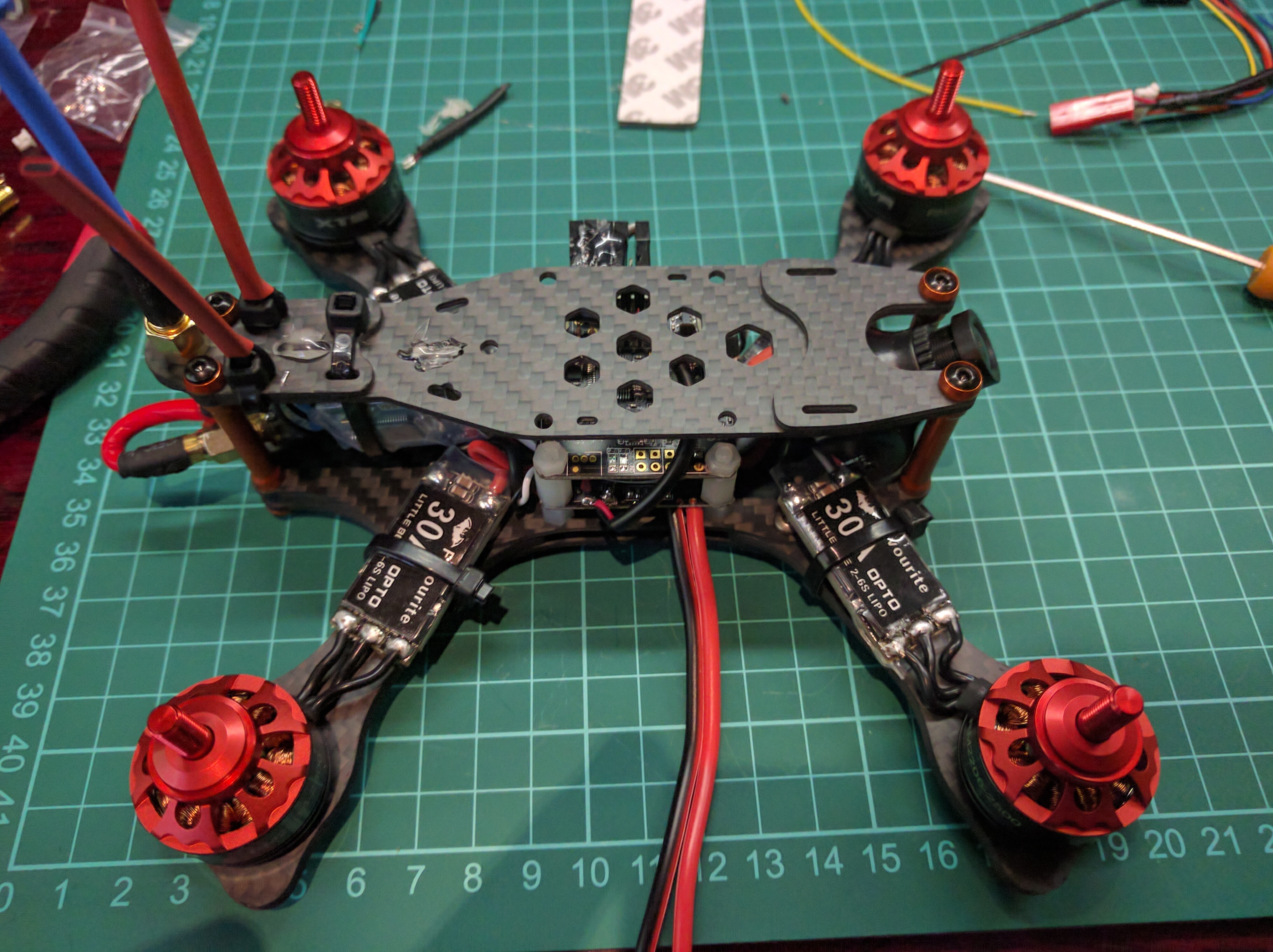
- The 30amp ESC with 4inch arms it a quite squeeze. Make sure you solder the motors directly to the ESC so you can fit everything on.
- Cable ties hold the ESCs in
- HS1177 STD is held in place by the top frame. Its cramped in there so it can’t move. If you use 5″ arms or change to 20a ESCS you can get the correct mounting plates for the HS1177 inside the frame.. I couldn’t fit them as ESCs were in the way.
- As I was using the Aomway to power my camera, I noticed the aomway did not output enough voltage to power camera from 5v PDB. I then had to change the PDB and make it 12v output. However when you change it, as per the Matek manual If the BEC is setted to 12V, No voltage is on the Aux pins, so I could no longer power my FC using ESC 1 section. I then had to
What would I change?
- I certainly would not build another 210 with 4inch arms. As the ESCS fit inside slightly, its a real pain to get this tight build done. Definitely use 5″ arms or bigger!
- Smaller VTX – The aomway is quite large and only just sneaks inside, was a pain getting it into position.
- Solder the ESC pins facing inwards, this would allow you to rotate the board so usb is easy to get to. I was lucky that I managed to get everything to fit with the way my ESCs are plugged in.
Pictures with notes

Frame bottom Built

Xnova Motors

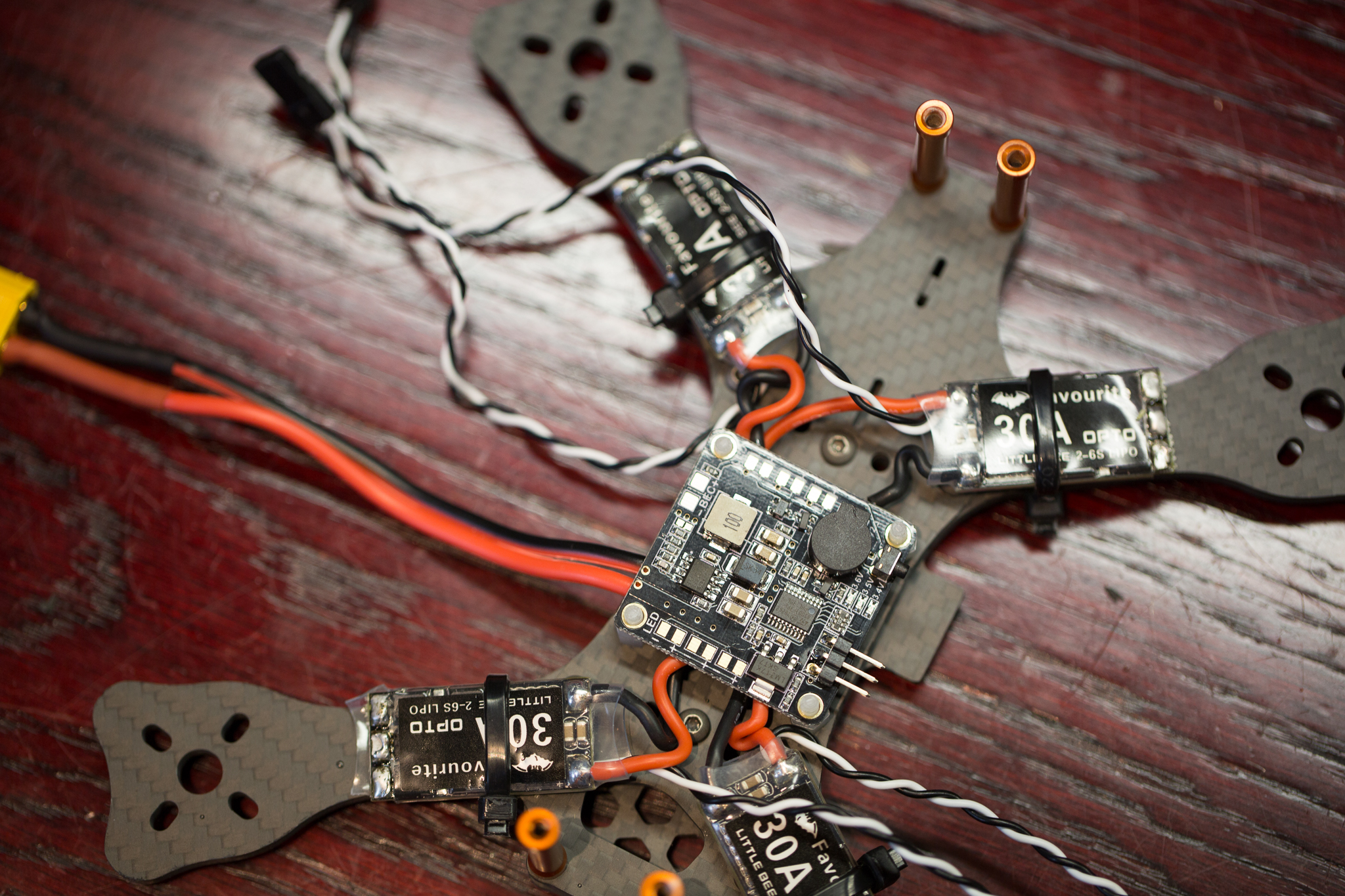
ESCS Soldered

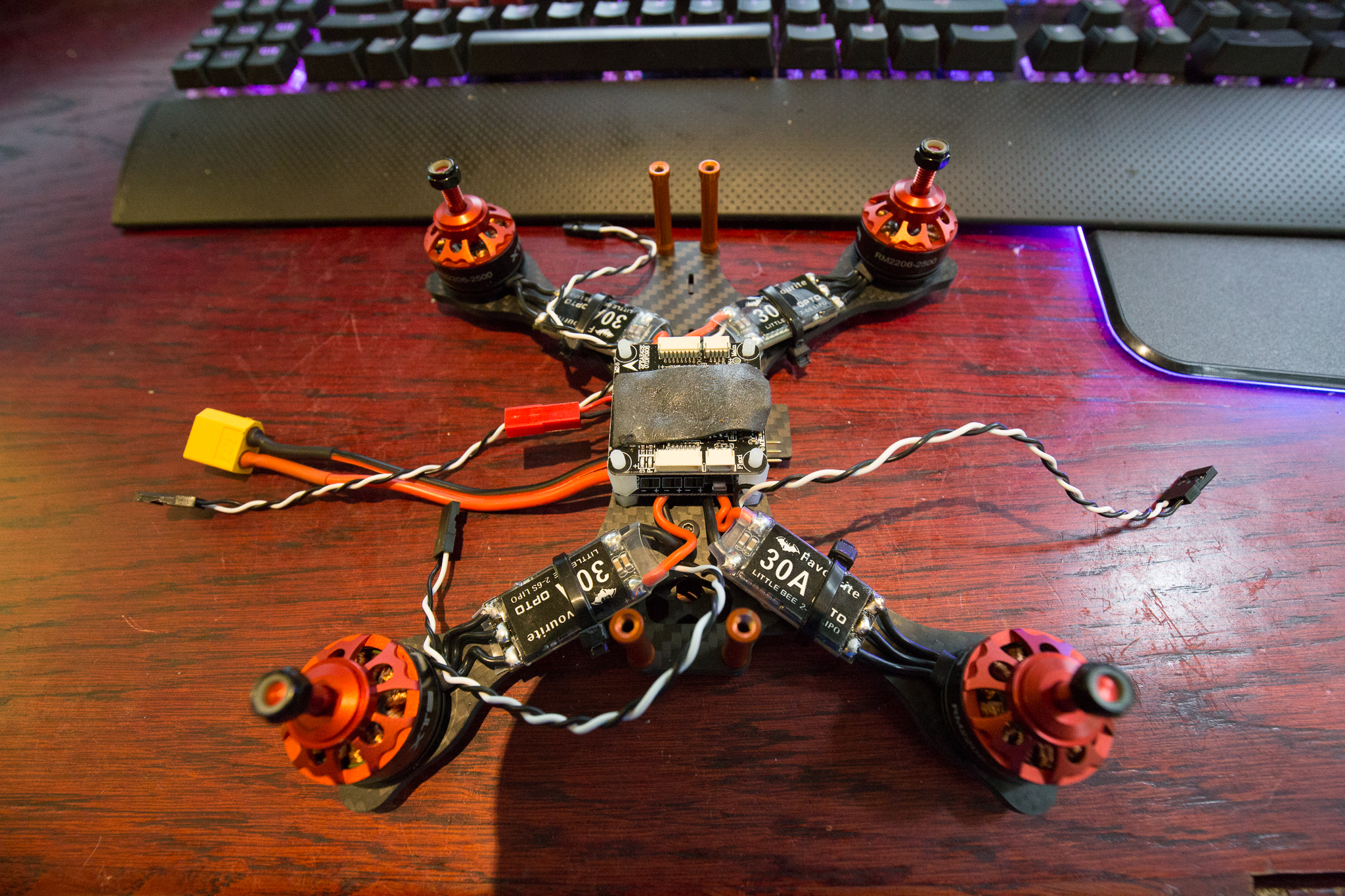
Finished build, just waiting on XSR, VTX and camera to be installed.

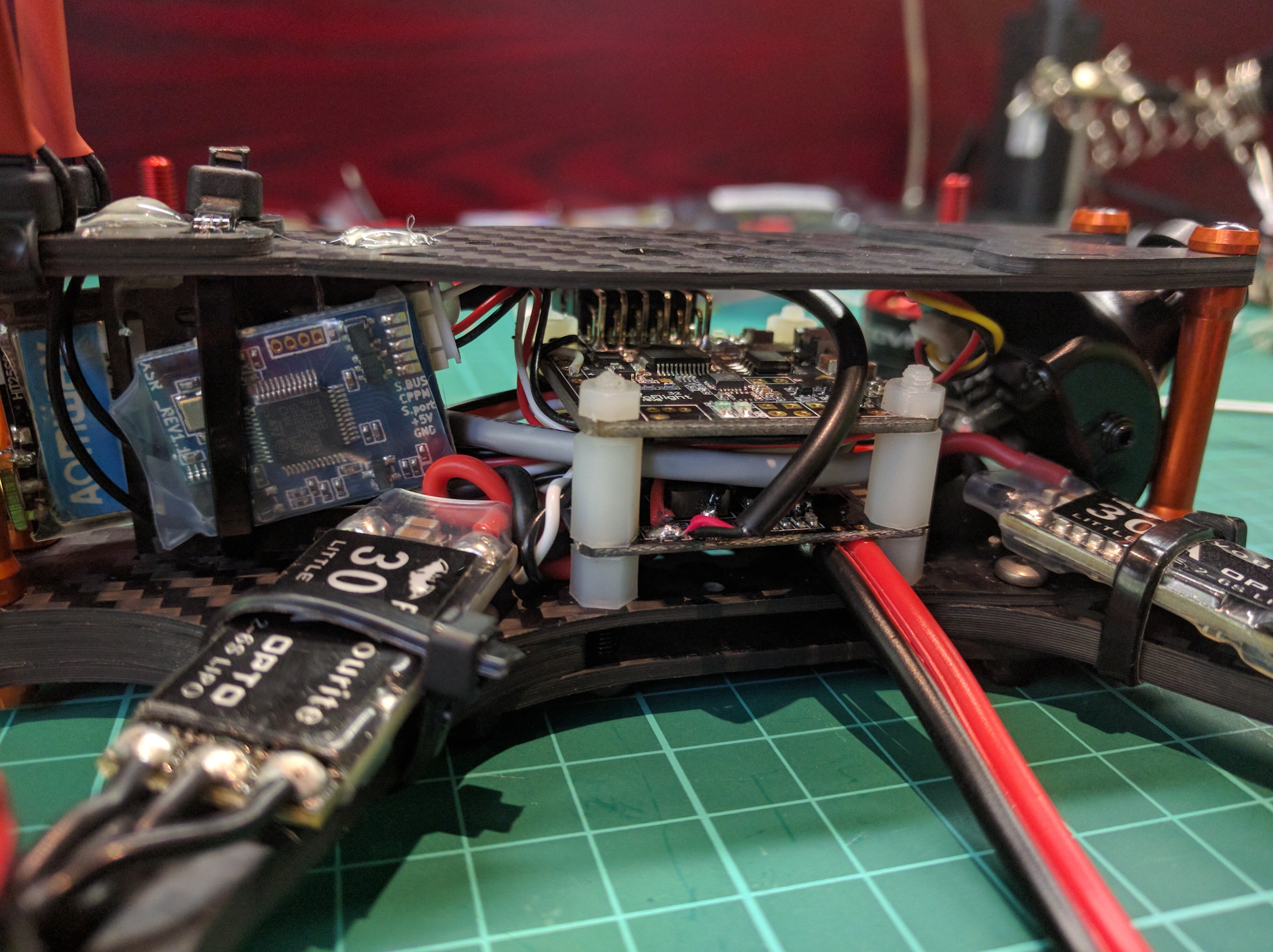
Connected XSR to Naze32
Setting up the FC – To get the buzzer working from the PDB via a switch on Taranis, I needed to follow this guide – http://goo.gl/bhaUwV
You connect a servo cable from PDB to ESC 1 spot on Naze32, then turn on servo tilt in clean flight. You then goto the servo tab and set servo 1 to the AUX channel on your taranis. You may need reverse the channel on Taranis as well to get it to function correct way. (I did)
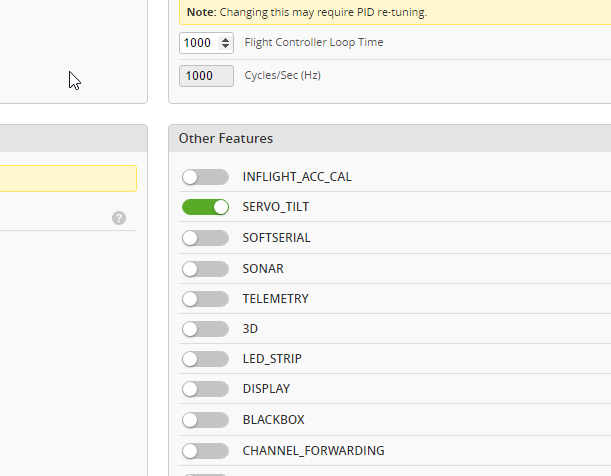
Enabling Servo Tilt
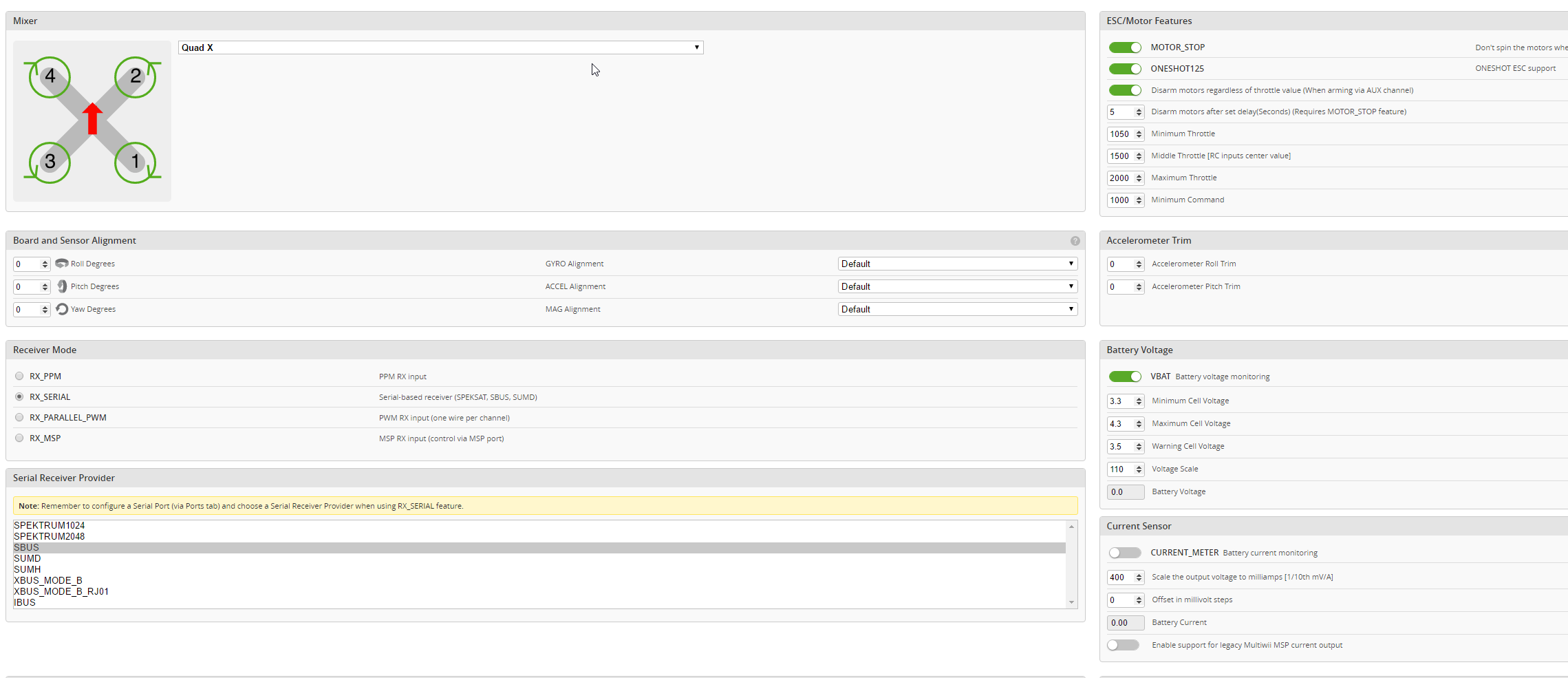
Screenshot of my Configuration

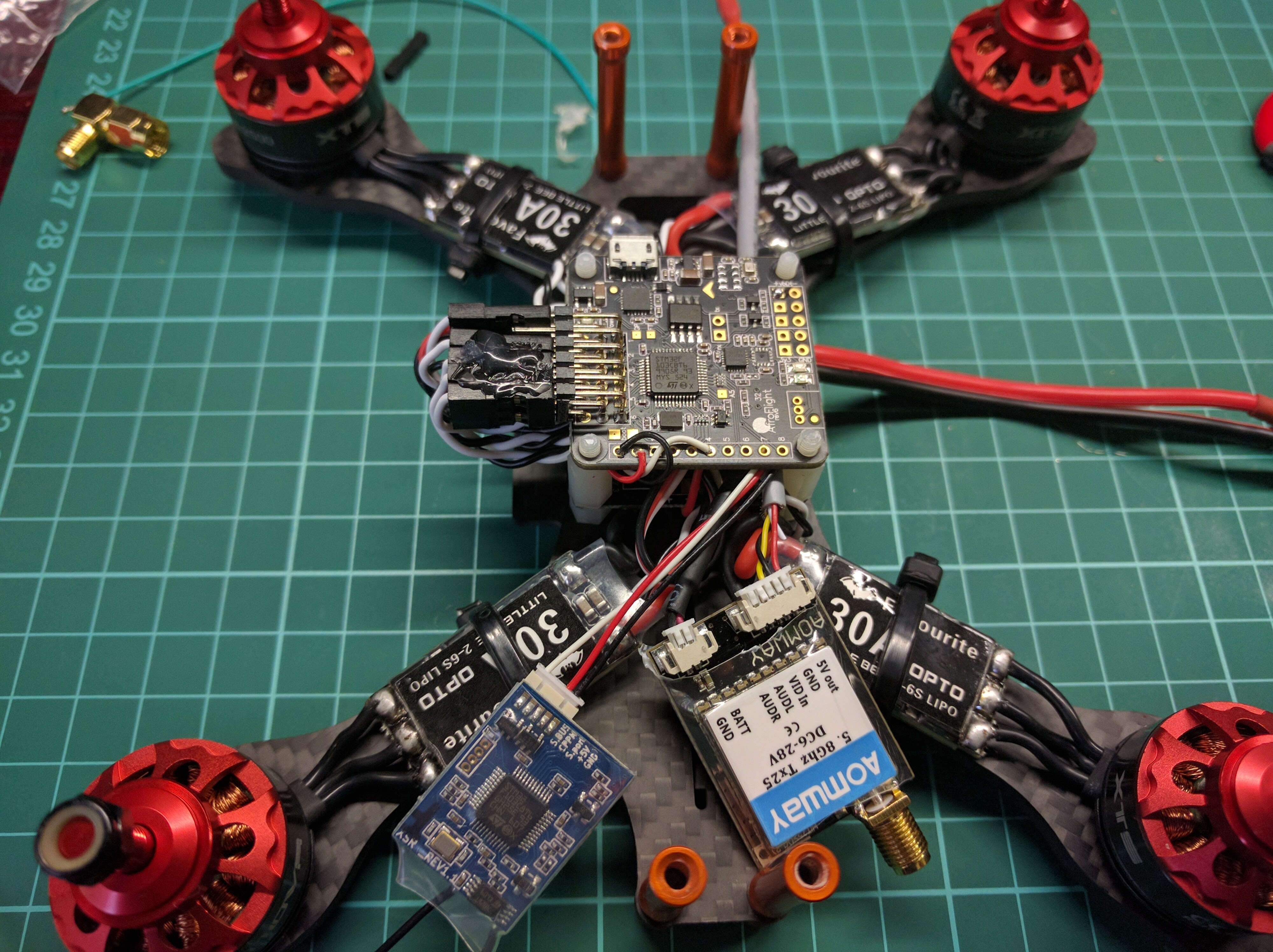
You can see my ESCS just fitted on and stuck inside the quad slightly.

I put some glue to hold the plate in as it kept falling out when I was trying to stick it all together

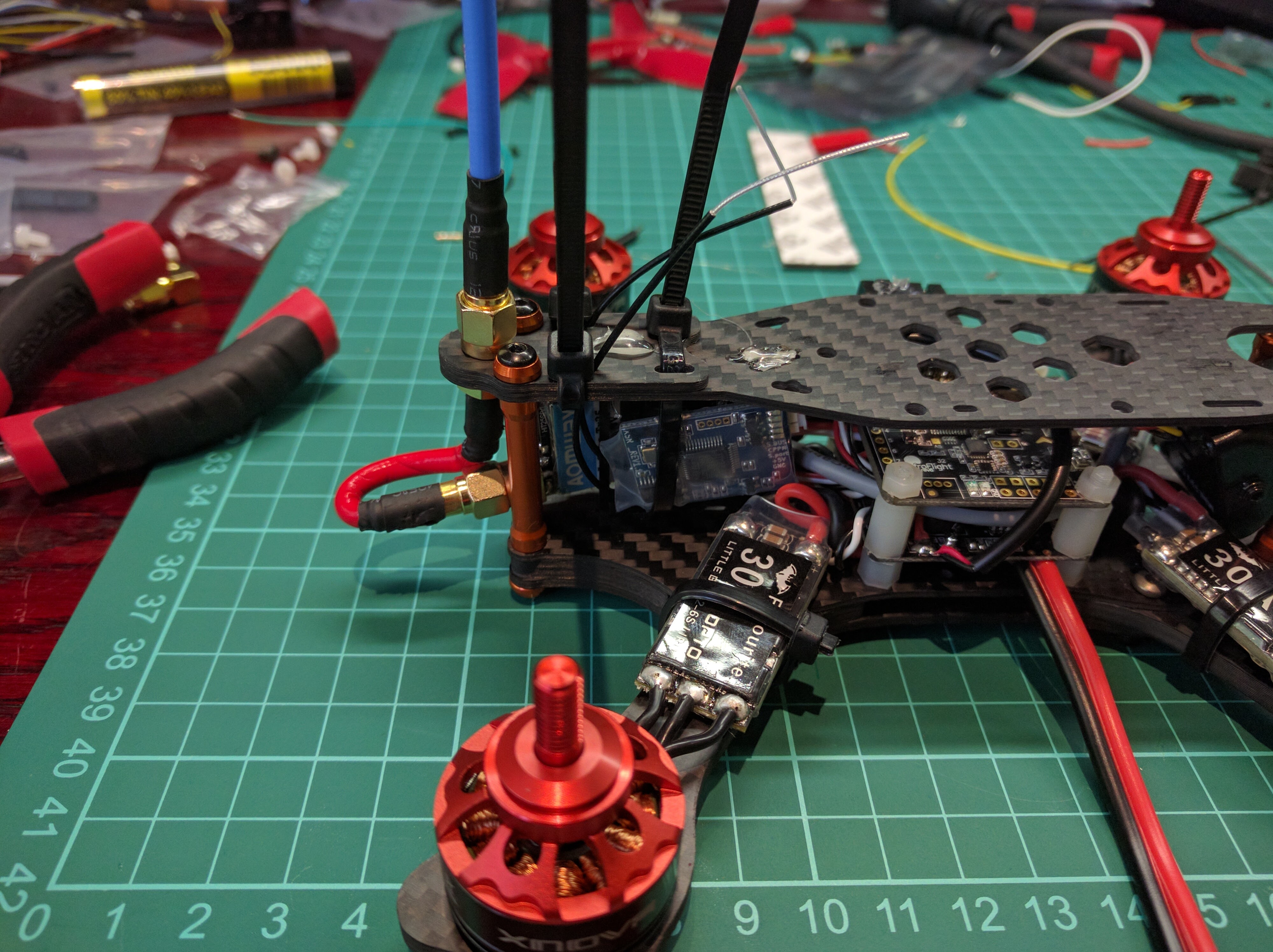
How it looked before I put everything together and zipped tied.

ESC Wires hooked up
Everything hooked up, now just need to put it together!

I was lucky here… because of the PDB buzzer setup i had, the bolt210 back panel fitted nicely in the ESC 2 spot.

Back all ziped tied in

Some pics of it nearly ready


All Finished and ready for the maiden flight!
Ended up hot gluing with cable ties to hold camera in.. wasnt firm enough from top plate.