It’s sometimes hard to find good information, so here’s the diagram you require!
Once you connect everything up you will need to set the following in Cleanflight
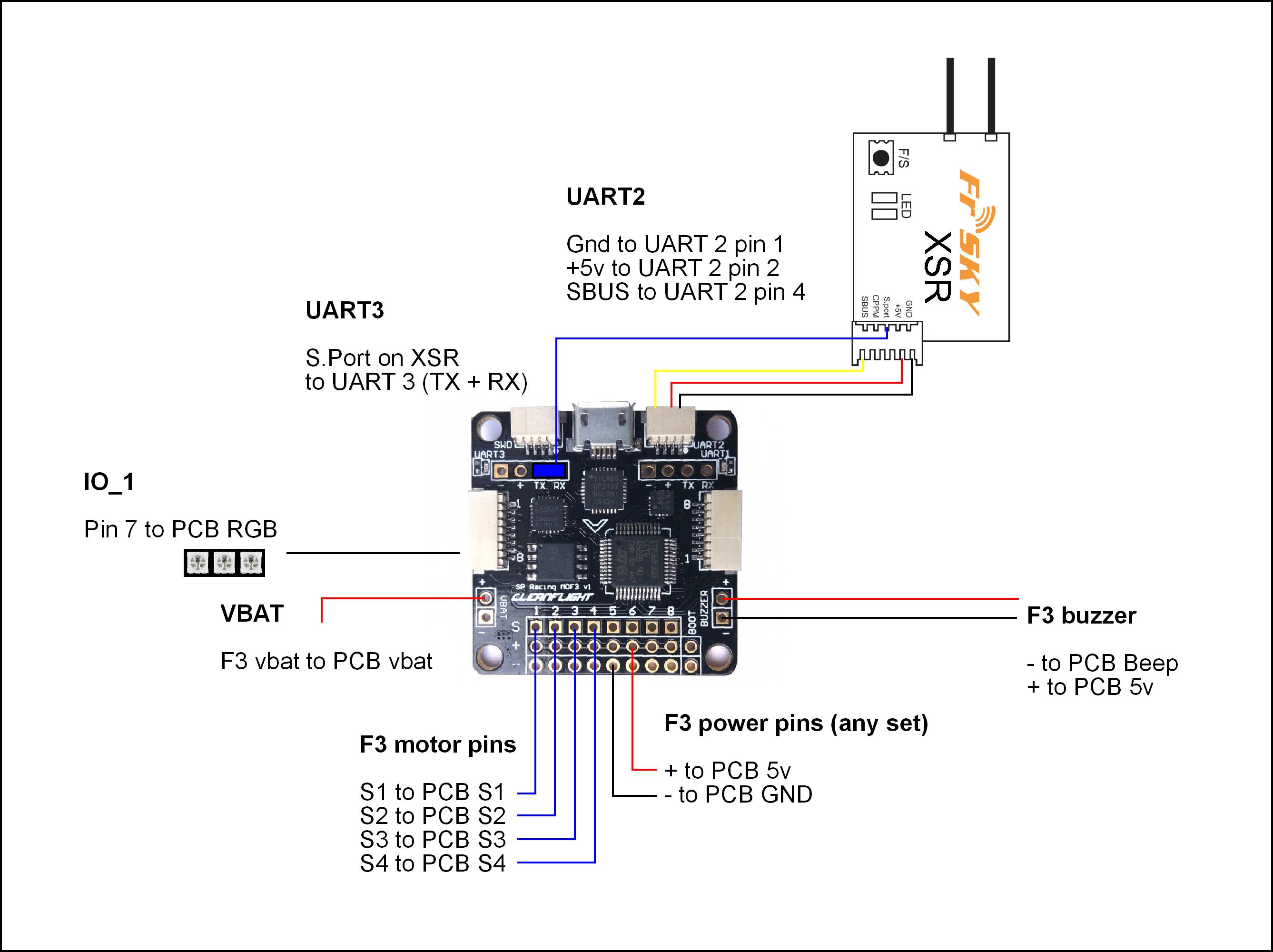
Ports Tab (STEP 1)
UART1 = LEAVE AS IS (For USB connection)
UART2 = SBUS
UART3 = SMART PORT
Configuration Tab (Step 2)
Turn On VBAT
Turn On Telementary
Turn On SBUS
Change Receiver Mode to Serial
On this wiring diagram do you bridge rx and tx for telemetry sport cable?
yes thats correct.
Thanks for prompt reply , get airborne now.
good job…
but i don’t have telemetry juste see
BtRx /
SWR /
A2 /
no VFAS for vbat telemetry :-\
am trying to construct a drone for my degree project ..and i intend on using this flight controller .please sir can to send me a connection diagram for the S3 flight contoller that will include the connections for the ESC/rotors, power imput ,reciever imput, and other necessary connection. will be waiting for your rapid response sir..thanks
Here is the rest:
Connection
A cable must be made to connect the Tx and Rx from Uart/Softserial to the the FrSky Smartport signal wire.[5]
In CLI of iNAV
set telemetry_inversion = ON
save
Transmitter
Go to model
Page to TELEMETRY
Connect a battery to the quad and power up
Scroll down Discover new sensors
AccZ, Tmp1, VFAS, GPS, etc. will now be listed
Scroll down to Screen 1 and select NUMS
Add the sensors that wish to be displayed
Exit
Hold down PAGE at the home menu to display Smartport Telemetry data